MAVS Lidar Roughness Analyzer
This code can be used to generate LIDAR output for scans of user-defined rough surfaces. Many instances of rough surfaces will be created and scanned, allowing the user to compile statistics of multiple scans.
The example can be run by typing
> ./path_to_mavs_install/build/bin/examples/lidar_roughness_analyzer input_file.json
Inputs
The input file is a json file that contains values for the parameters of the simulation. Examples are in path_to_mavs_install/data/sims/misc_sims/lidar_roughness.
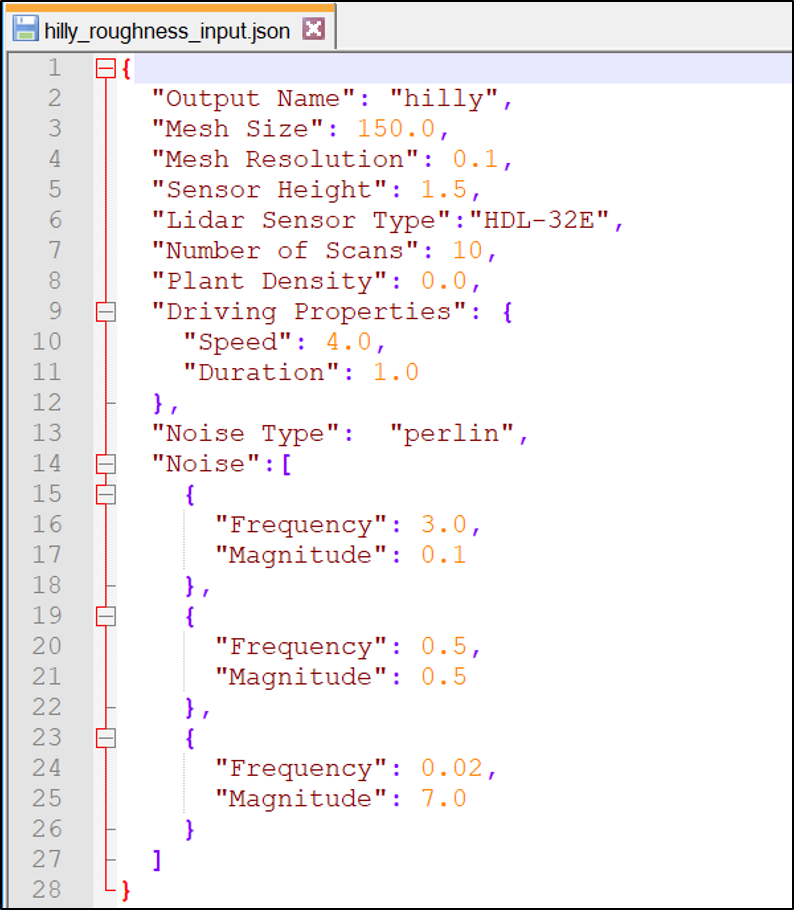
- “Output Name”: A string that will be used in all the output file names as an identifier
- “Mesh Size”: The spatial length of the sides of the terrain, in meters
- “Mesh Resolution”: The spatial resolution of the mesh, in meters
- “Sensor Height”: The height of the sensor above the ground, in meters
- “Lidar Sensor Type”: The type of sensor to simulate. Options are
- “HDL-32E” - Velodyne HDL-32E
- “HDL-64E” - Velodyne HDL-64E
- “VLP-16” - Velodyne Puck
- “M8” - Quanergy M8
- “OS1” - Ouster OS1
- “OS2” - Ouster OS2
- “Number of Scans”: The number of unique terrains to generate
- “Plant Density”: The desired plant density, in #/m^2. Set to 0.0 to have no plants
- “Driving Properties”: You can have the vehicle drive through the scene to create multiple scans per scene. Set “Speed” and “Duration” to 0.0 if driving is not desired
- “Speed”: The desired speed in m/s
- “Duration”: The length (seconds) of the drive. Lidar will generate 10 scans/second.
- “Noise Type”: Can be either “perlin” or “gaussian”
- “Noise”: Define the roughness parameters of the scene. You can define any number of “decades” of noise. For each decade, you must define the frequency and magnitude of the noise.
- “Frequency”: Spatial frequency of the noise in 1/meters
- “Magnitude”: Magnitude of the noise in meters
Note that there are slight differences in the meaning of the Frequency and Magnitude parameters when perlin and gaussian noise are used. For gaussian noise, Magnitude is taken to be the RMS magnitude of the noise. This means that there may be elevations higher than the value of Magnitude, whereas for Perlin noise, the highest elevations will be equal to Magnitude. Similarly, for Gaussian noise, Frequency is set equal to 1/(ACL) where ACL is the autocorrelation length of the terrain.
Outputs
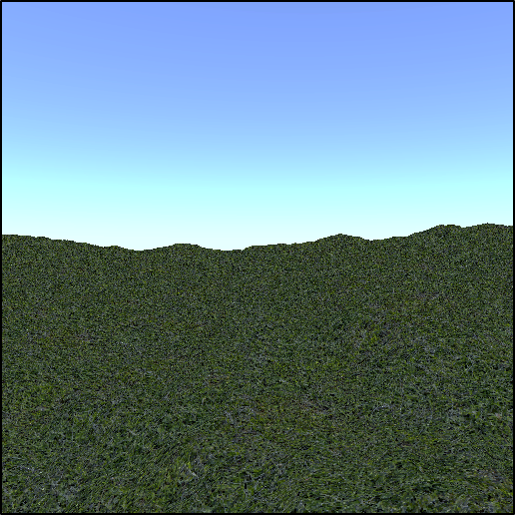
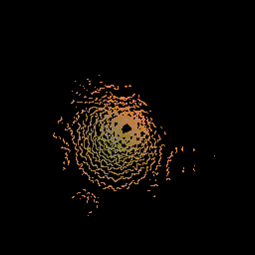
For each scan, three output files are saved. The first is a rendering of the scene from the position of the lidar sensor and the second is a top down view of the point cloud (see images below). The last output is a text file (with .pts extension). There are 4 columns in the file corresponding to x-y-z-intensity. The points are registered in world coordinates.